coding笔记:前缀和和差分

前缀和和差分基础浅析
前缀和
- 定义:使用s[N]表示数组q[N]的前缀和数组,s[i]表示q[1-i]的元素的和
- 公式:
- 注意,下标范围为1-N,且s[0]=0
差分
- 定义:前缀和的逆运算,假想一个d[N],使得q[N]是d的前缀和数组,那么d[N]就称为q的差分。
- 公式:
- 注意,d下标范围为1-N
前缀和和差分的应用
求一段数的和O(1)
- 只需要事先处理得到q数组的前缀和s数组,就可以通过
在O(1)时间内完成一段数的求和
对一段数加上某个数O(1)
- 假设我们已经有了差分数组,我们只需要对其求一遍前缀和即可得到原数组,时间复杂度为O(n)
- 我们对d[i]加上c后,a[i]~最后都会加上c(根据前缀和的定义),所有如果想要给一段数(l,r)都加上c,就只需要d[l]+c,d[r+1]-c
对子矩阵求和O(1)
对一维进行扩展可以得到二维区间和=
,图像直观解释如下图: 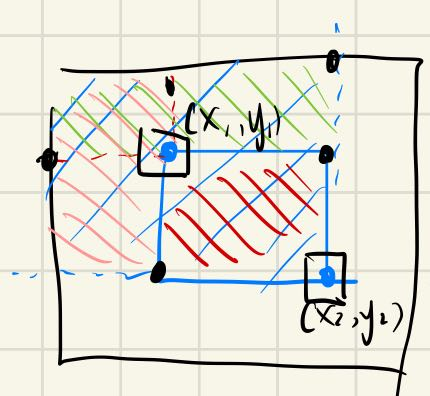
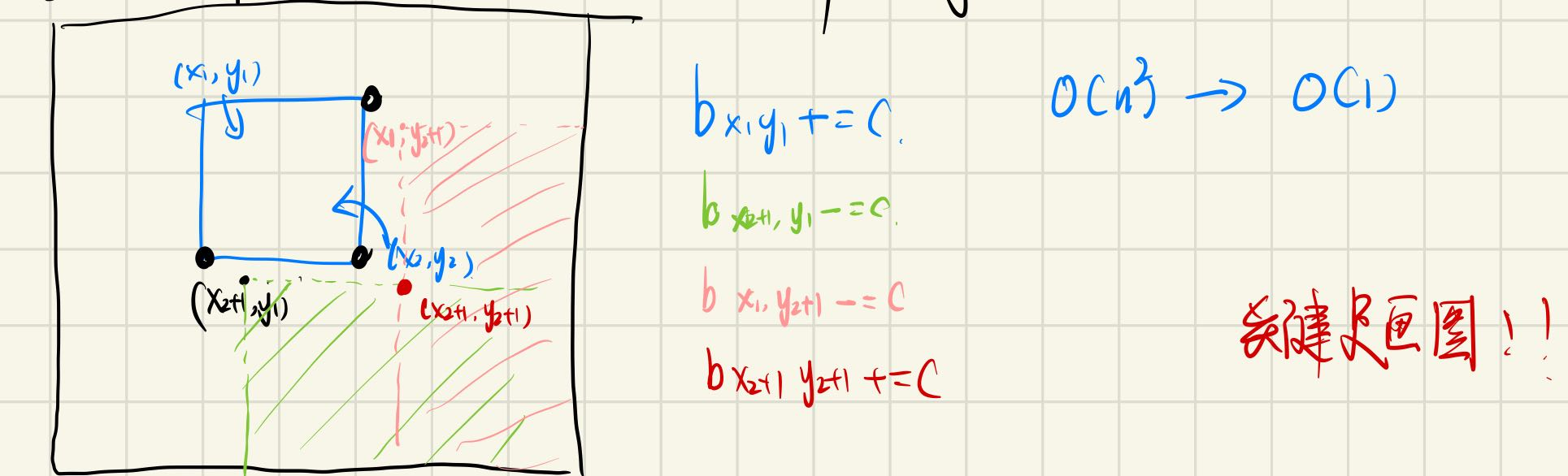
对二维区间加上某个数O(1)
画图可以清楚的解释该算法:
代码如下:
1 | template<int n,int m> |
注:在代码里我使用了二维数组传参的一种优美方法(使用模板推导出二维数组维度),在函数调用时无须指明维度大小,在函数体内也可以直接索引,从而可以减少代码量。
同理可以进行推广到三维甚至多维数组,代码如下:
1 | template<int n, int m, int q> |
推广:3D空间求和O(1)
应该不会考类似的题,但是对于拓展思维应该还是有用的
1 | template<int n, int m, int q> |
- Post title:coding笔记:前缀和和差分
- Post author:sixwalter
- Create time:2023-08-05 11:14:26
- Post link:https://coelien.github.io/2023/08/05/coding-solution/前缀和和差分/
- Copyright Notice:All articles in this blog are licensed under BY-NC-SA unless stating additionally.
Comments