多车辆行为识别及预测

高级辅助驾驶技术介绍—多车辆行为识别及预测
P.S. 这是一个完全全新的方向,之前没有人在这个方面有过尝试,我们可以说是开创者
比赛的核心技术: 车辆行为识别
任务目标
通过周围车辆的行为,预测当前第一视角车辆(车辆行车记录仪拍下的)的安全驾驶行为类型,包括:减速,加速,左拐,右拐4个类别。
为什么要进行多车辆行为识别及预测?
在复杂的交通场景中,车辆之间的行为在时空上是相互影响的。我们假设第一视角中的某台车的车辆行为(减速,加速,左拐,右拐)受其他车辆的历史运动的影响。那么我们需要对该行为特征在时空维度进行建模,并充分考虑车辆之间的相互影响。如何发掘并对这些关系进行推理,是多车辆行为识别及预测任务的难点。
任务标注

- 车辆bounding box
- 4个关键点
- 个体车辆行为类型(减速,加速,左拐,右拐)
- 该场景下当前车辆的正确驾驶行为类型(减速,加速,左拐,右拐)
任务框架
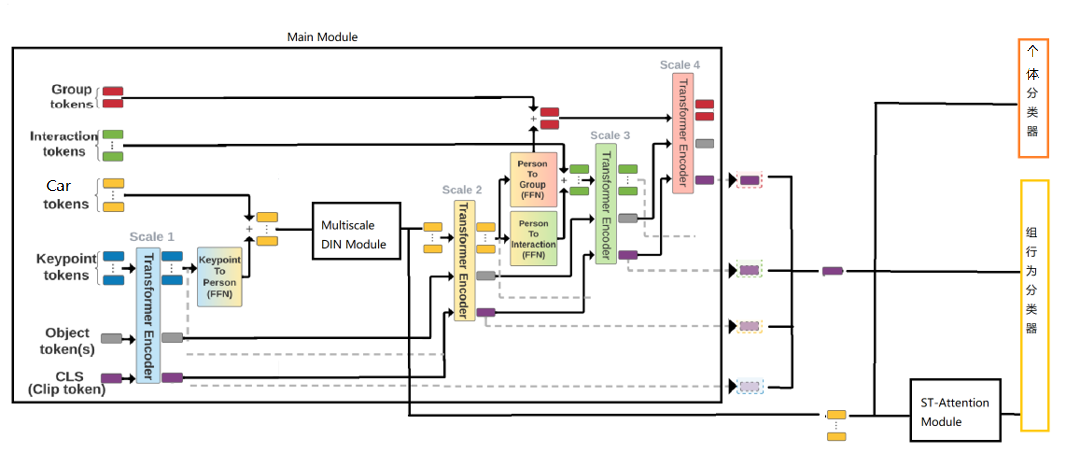
任务核心技术
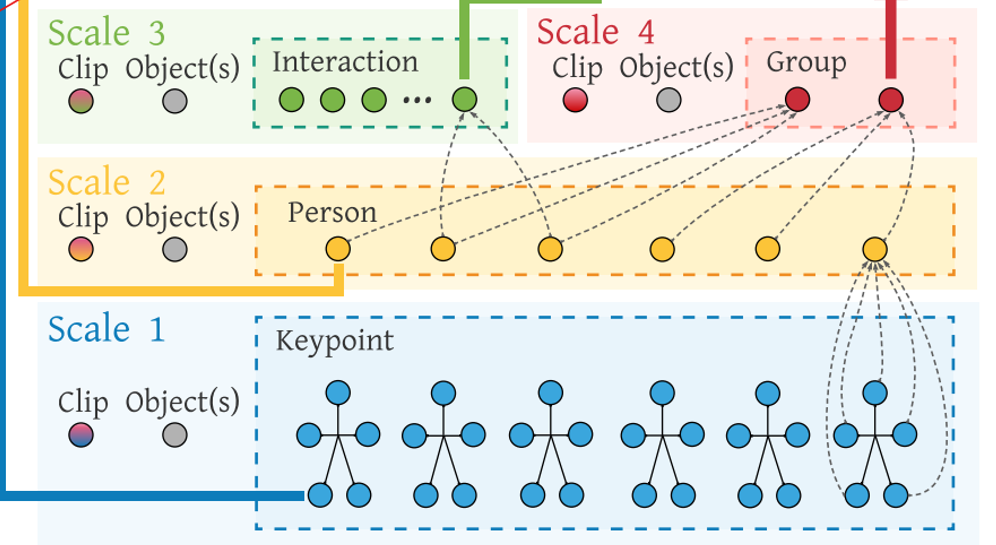
多层次语义场景推理
- scale 1: 关键点(Keypoint)
- scale 2: 车辆(Car)
- scale 3: 同一车道线内的车辆(Interaction)
- scale 4: 全部车辆(Group)
可变形时空推理(RADIN模块)
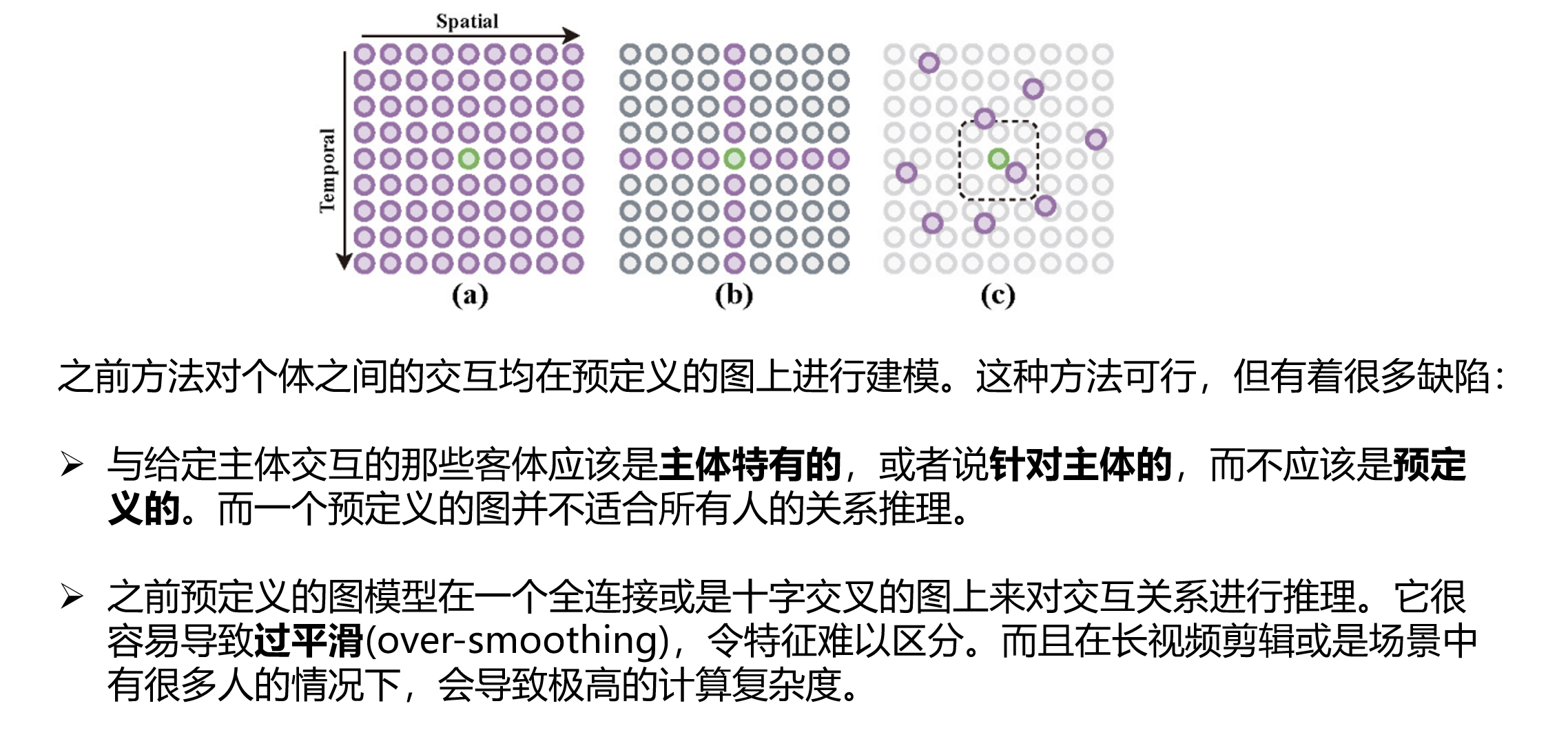
在DIN模块的基础上,我们假设只有相关联的特征才会对我们当前的特征有贡献,所以可以定义一个gate来对特征进行门控:
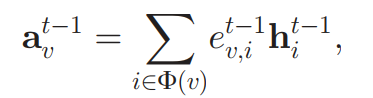

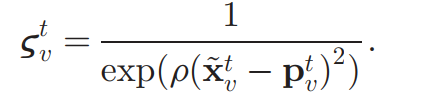
- 如果相差越小,值越接近1
自注意力融合
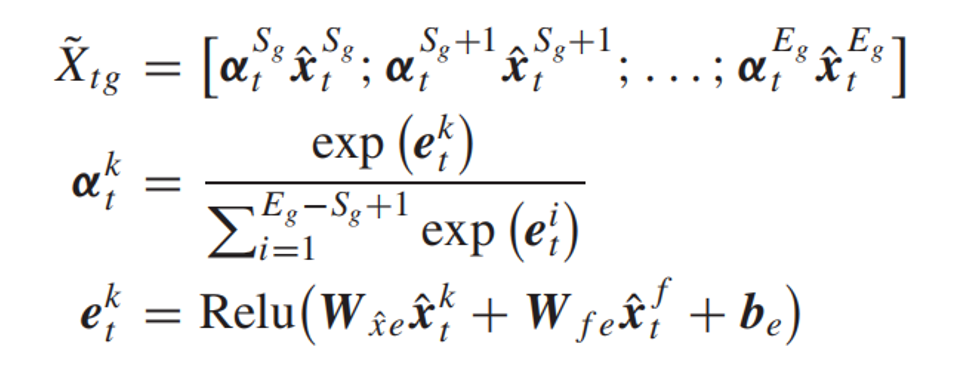
- 不同的特征的对于群体行为的贡献程度不同,可以利用自注意力机制对贡献程度进行建模
- Post title:多车辆行为识别及预测
- Post author:sixwalter
- Create time:2023-08-05 11:14:26
- Post link:https://coelien.github.io/2023/08/05/deep-learning/第一章/新方向/
- Copyright Notice:All articles in this blog are licensed under BY-NC-SA unless stating additionally.
Comments