论文阅读笔记:”Social LSTM:Human Trajectory Prediction in Crowded Spaces“

论文阅读笔记—Social LSTM:Human Trajectory Prediction in Crowded Spaces(CVPR 2016)
原理
简单来讲,该论文通过邻域池化的思想来综合多个行人轨迹的的信息,提供给LSTM模型来生成下一个隐变量,这个隐变量包含了自身的历史轨迹信息,也包含了其邻域LSTM的历史信息。这个问题的目的是预测密集行人的轨迹,来防止与人发生碰撞,是序列生成问题的一种变体。作者使用了带有社交池化的LSTM模型,希望对复杂的行人社交常识(避让,转向等)进行建模,并通过该模型解释聚集行人场景下的运动行为。
隐变量社交池化
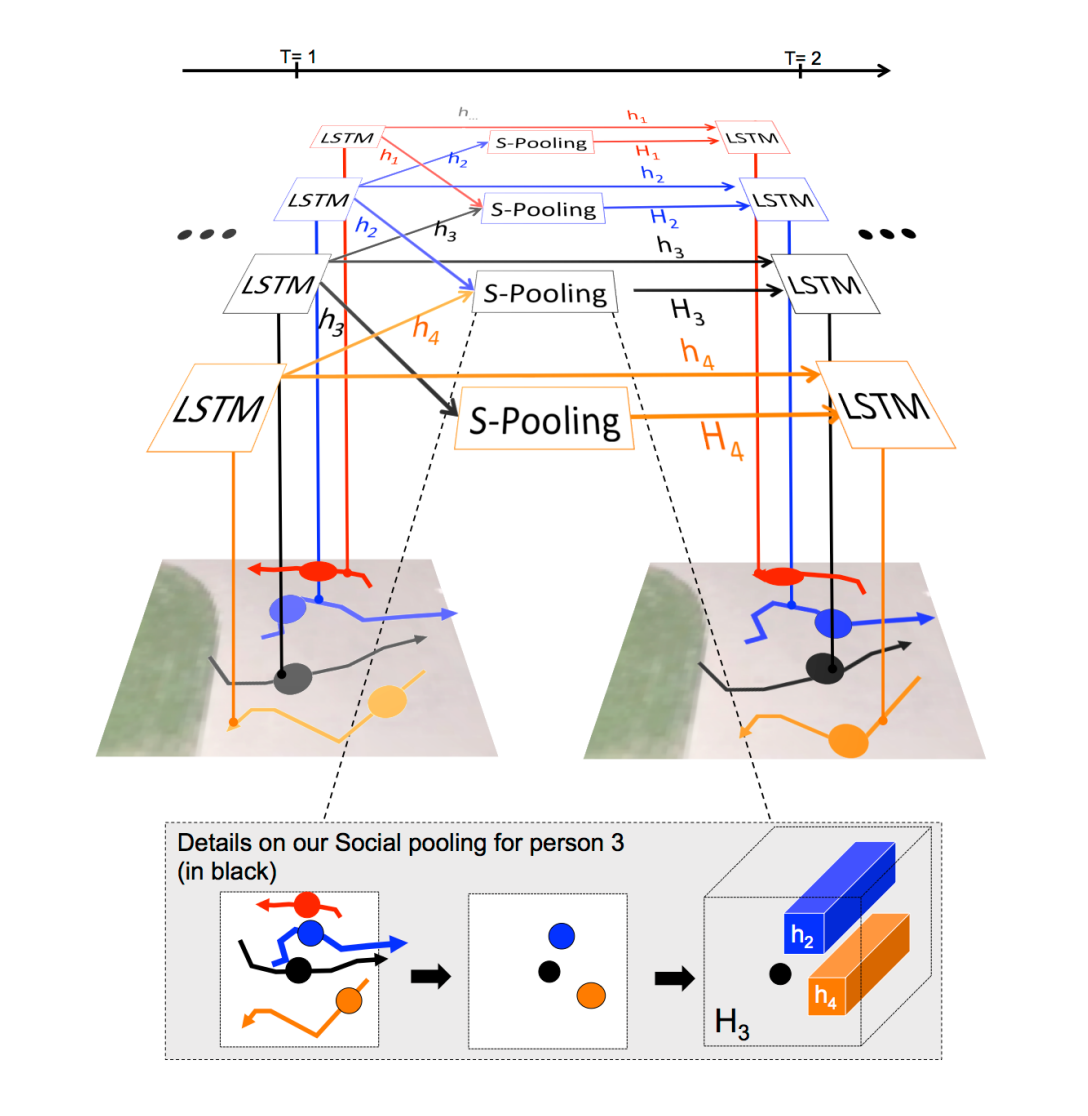
作者的思想很简单,通过共享周围邻域内的LSTM隐变量,使得模型具有捕获周围人运动信息的能力。在每一个时间步,LSTM单元从其领域LSTM单元接受池化隐状态信息,如下图所示,池化时,隐变量的空间信息可以在一定程度上保持。
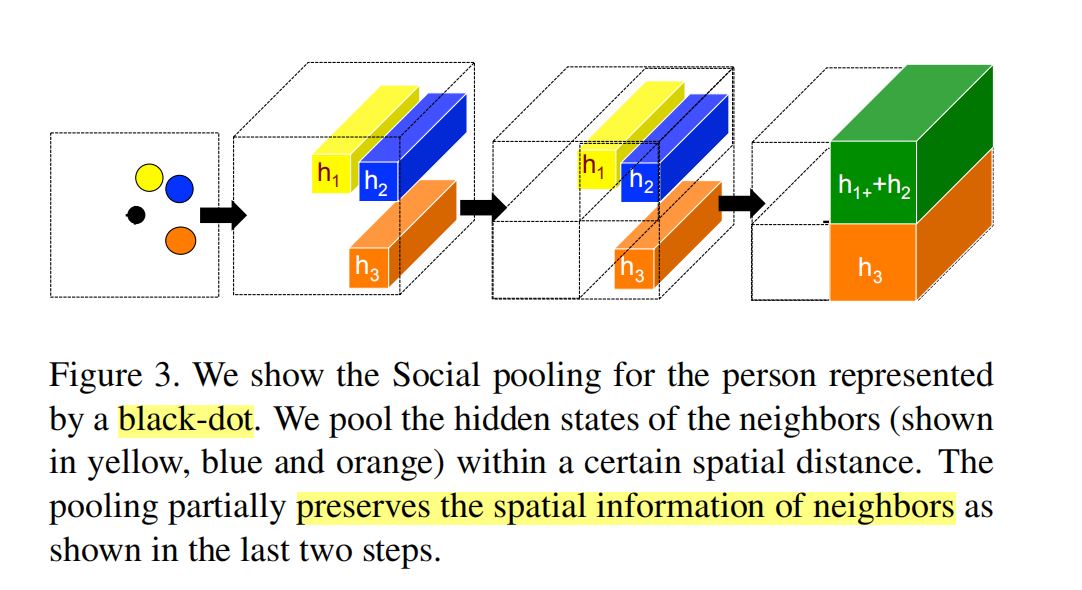
下面的等式(1)即社交池化的形式化表达,它是一个($nnD$)形状的3D张量,n代表邻域的范围,D为隐状态的维度。

位置估计
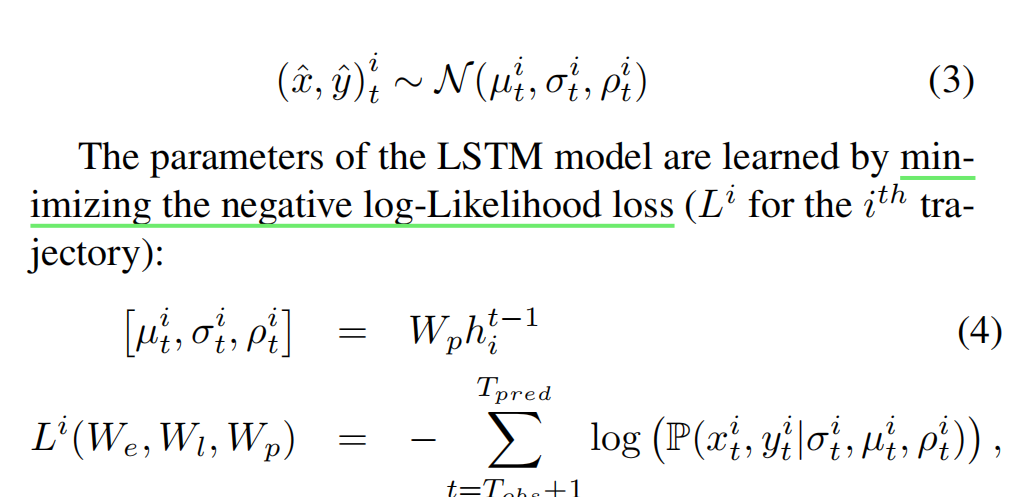
论文里使用了t时刻的隐状态来预测t+1时刻人i轨迹位置的分布。作者假设其分布服从二元高斯分布,因其有5个待估计参数,可以利用线性层(权重矩阵shape为5*D)来估计,如等式4所示。我们可以通过该分布生成t+1时刻人i的轨迹位置。LSTM的参数可以使用似然函数损失作为目标函数来进行优化(即最小化负对数似然损失)。
- Post title:论文阅读笔记:”Social LSTM:Human Trajectory Prediction in Crowded Spaces“
- Post author:sixwalter
- Create time:2023-08-05 11:14:26
- Post link:https://coelien.github.io/2023/08/05/paper-reading/paper_reading_005/
- Copyright Notice:All articles in this blog are licensed under BY-NC-SA unless stating additionally.
Comments