
PA1 notes
Some preparations
How to get all things done remotely?
Because I have my linux server in my bedroom, which is far away for me to run graphic UI applications in my work place. (Obviously, commands through shell are fine).
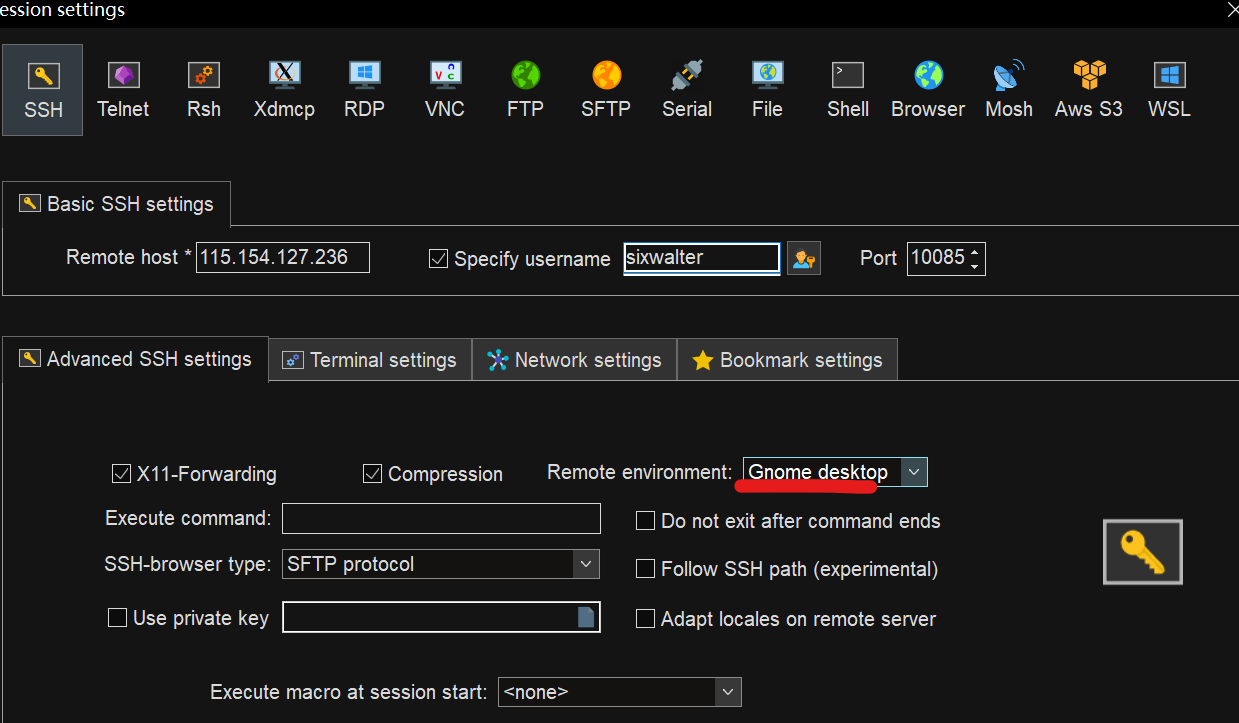
So I STFW and found that mobaXterm actually support x11 forwarding, which can show the GNOME desktop. I made some configuration to realize it:
- change the remote environment to Gnome desktop:
Edit /etc/ssh/ssh_config to have the following settings
ForwardAgent yes
ForwardX11 yes
ForwardX11Trusted yes
Edit /etc/ssh/sshd_config to have the following setting
- X11Forwarding yes
set xdmcp on gdm3
- vim /etc/gdm3/custom.conf
apt install gnome-tweaks
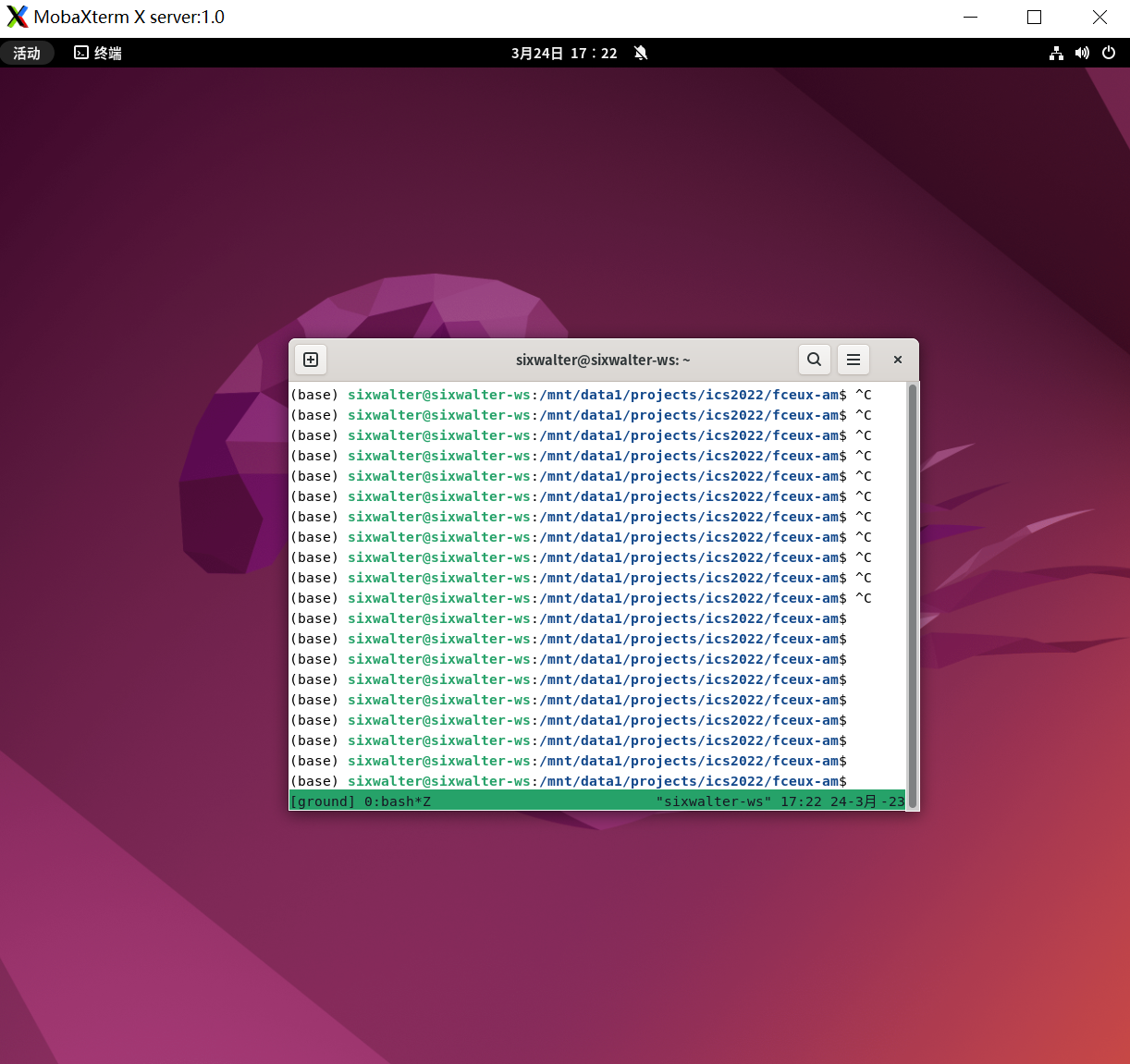
reboot. (all things done!)
multi thread compiling v.s. single thread compiling
single thread:
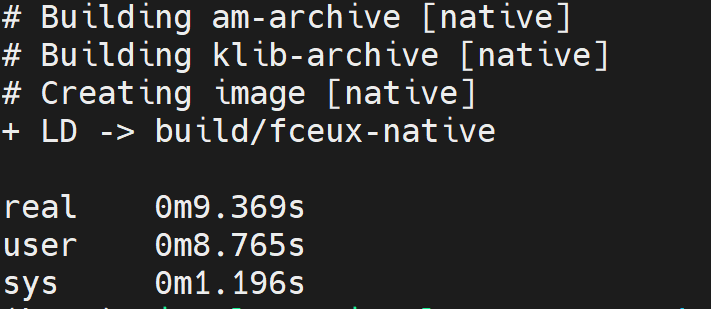
16 threads:
if we don’t change any file, object files should be the same, so there is no need compiling again!
By using ccache the compiler time is longer, which is confusing


How does can Super Mario runs on the linux machine?
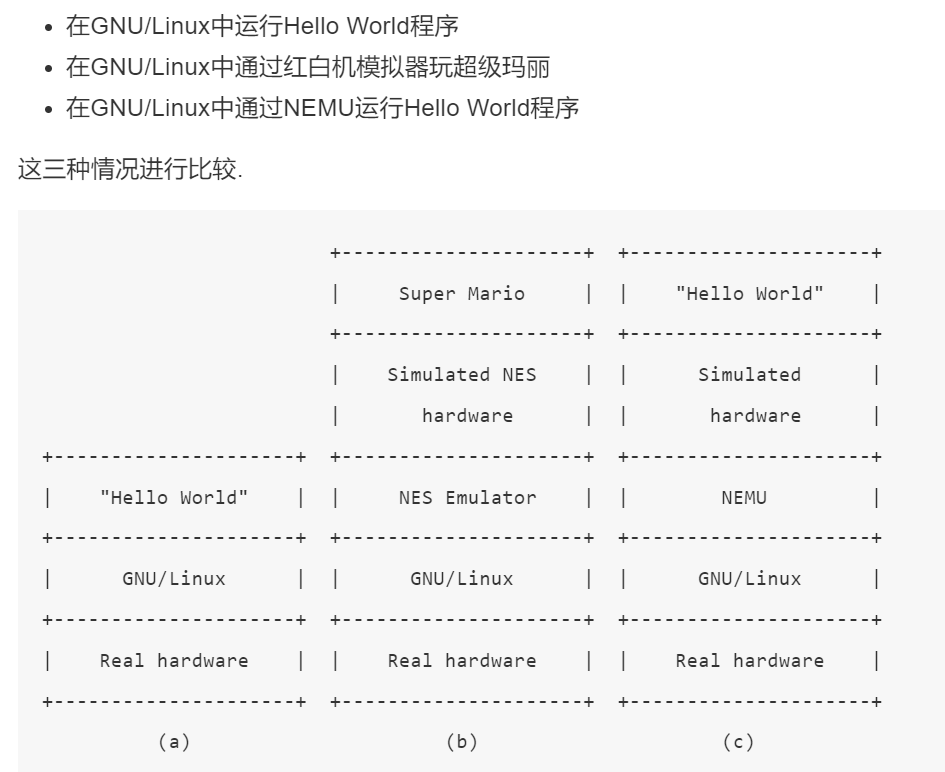
- for super mario, it can’t figure out it runs on the real Red White devices or runs on the simulated “Red White devices”
NEMU
What is NEMU?
NEMU is a simulated computer system. Physical computer’s essential functions is implemented by programs in NEMU.
在NEMU中, 每一个硬件部件都由一个程序相关的数据对象来模拟, 例如变量, 数组, 结构体等;
对这些硬件部件的操作则通过对相应数据对象的操作来模拟
ISA
Firstly… you need to choose ISA
ISA is instruction set architecture, also called computer architecture, is an abstraction model of computer
A device that execute instructions described by that ISA such as a CPU, is called an implementation.
ISA defines supported instructions, data types, registers, the hardware supporting for managing main memory, fundamental features(such as memory consistency, addressing modes, virtual memory), and the input/output model
因此, ISA的本质就是类似这样的规范. 所以ISA的存在形式既不是硬件电路, 也不是软件代码, 而是一本规范手册.
和螺钉螺母的生产过程类似, 计算机硬件是按照ISA规范手册构造出来的, 而程序也是按照ISA规范手册编写(或生成)出来的
Goals
至于ISA规范里面都有哪些内容, 我们应该如何构造一个符合规范的计算机, 程序应该如何遵守这些规范来在计算机上运行 is our goal.
Chapter of Creating the World
storage(存储器): we need some place to store our program
CPU: we need someone to calculate(compute) CPU是负责处理数据的核心电路单元
同时天下也没有免费的午餐, 存储器的大容量也是需要付出相应的代价的, 那就是速度慢, 这是先驱也无法违背的材料特性规律
- 如果每完成一次累加都需要把它写回存储器, 然后又把它从存储器中读出来继续加, 这样就太不方便了.先驱为CPU创造了寄存器, 可以让CPU把正在处理中的数据暂时存放在其中.
如果没有寄存器, 计算机还可以工作吗?
to let the CPU become the most loyal servant, pioneer designs “instructions“, to tell CPU to do what kind of operation to data
能否让程序来自动控制计算机的执行?
先驱和CPU作了一个简单的约定: 当执行完一条指令之后, 就继续执行下一条指令.
但CPU怎么知道现在执行到哪一条指令呢? 为此, 先驱为CPU创造了一个特殊的计数器, 叫”程序计数器”
从此以后, 计算机就只需要做一件事情:
1 | while (1) { |
一个足够简单的计算机: 我们只要将一段指令序列放置在存储器中, 然后让PC指向第一条指令, 计算机就会自动执行这一段指令序列, 永不停止
一个最简单的真实计算机需要满足哪些条件:
- 结构上, TRM有存储器, 有PC, 有寄存器, 有加法器
- 工作方式上, TRM不断地重复以下过程: 从PC指示的存储器位置取出指令, 执行指令, 然后更新PC
计算机是个状态机
既然计算机是一个数组逻辑电路, 那么我们可以把计算机划分成两部分, 一部分由所有时序逻辑部件(存储器, 计数器, 寄存器)构成, 另一部分则是剩余的组合逻辑部件(如加法器等). 这样以后, 我们就可以从状态机模型的视角来理解计算机的工作过程了: 在每个时钟周期到来的时候, 计算机根据当前时序逻辑部件的状态, 在组合逻辑部件的作用下, 计算出并转移到下一时钟周期的新状态.
程序是一个状态机
程序是指令的集合。那么指令在状态机的模型里面是什么呢?
所以在状态机模型里面, 指令可以看成是计算机进行一次状态转移的输入激励.
假设某个计算机有4个8位的寄存器, 一个4位PC, 以及一段16字节的内存(也就是存储器)
那么这个计算机可以表示比特总数为:
1 | 4*8 + 4 + 16*8 = 164 |
因此这个计算机总共可以有
假设这个在这个计算机中, 所有指令的行为都是确定的, 那么给定N个状态中的任意一个, 其转移之后的新状态也是唯一确定的.
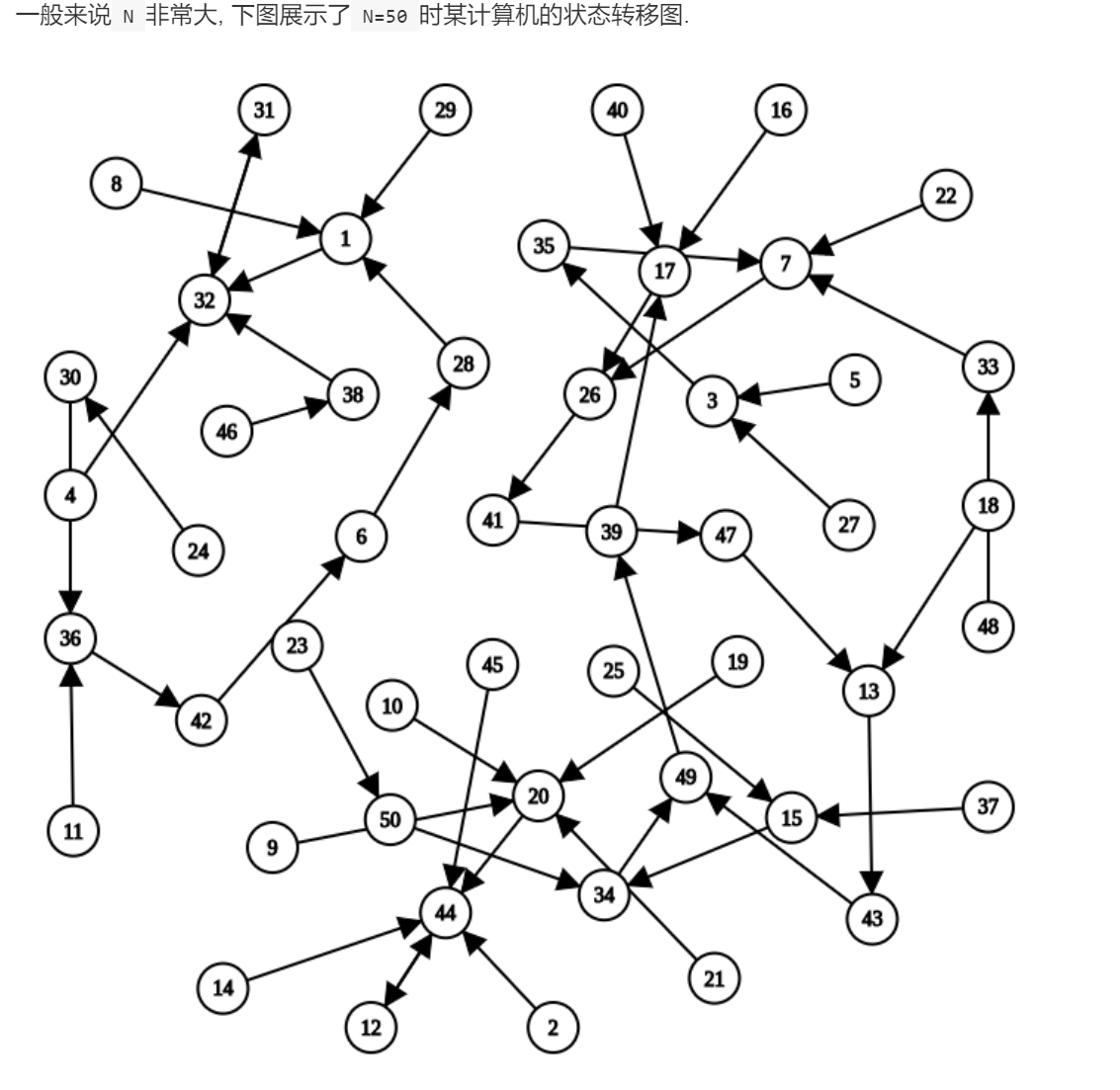
通过状态机的视角来解释**”程序在计算机上运行”的本质**
给定一个程序, 把它放到计算机的内存中, 就相当于在状态数量为N的状态转移图中指定了一个初始状态, 程序运行的过程就是从这个初始状态开始, 每执行完一条指令, 就会进行一次确定的状态转移. 也就是说, 程序也可以看成一个状态机! 这个状态机是上文提到的大状态机(状态数量为N)的子集.
例如:1+2+…+100
1 | // PC: instruction | // label: statement |
的状态机转换为:
(0,x,x) -> (1,0,x)->(2,0,0)->(3,0,1)->(4,1,1)->(2,1,1)->(3,1,2)->(4,3,2)->….->(2,4851,98)->(3,4851,99)->(4,4950,99)->(2,4950,99)->(3,4950,100)->(4,5050,100)->(5,5050,100)->….
- 以代码(或指令序列)为表现形式的静态视角
- 描述精简
- 分支, 循环和函数调用的组合使得我们可以通过少量代码实现出很复杂的功能.
- 但这也可能会使得我们对程序行为的理解造成困难
- 以状态机的状态转移为运行效果的动态视角
- 直接刻画了”程序在计算机上运行”的本质
- 但对于程序的局部行为, 尤其是从静态视角来看难以理解的行为, 状态机视角可以让我们清楚地了解相应的细节.
因为在PA中你需要不断地和代码打交道. 如果你不能从微观视角理解某些关键代码的行为, 你也无法从宏观视角完全弄清楚程序究竟是如何运行的.
RTFSC
在NEMU中模拟的计算机称为”客户(guest)计算机“, 在NEMU中运行的程序称为”客户程序“.
框架代码初探
1 | ics2022 |
NEMU的四个主要模块
- monitor
- CPU
- memory
- device
Monitor模块
监控客户计算机的运行状态而引入的
- 负责与GNU/Linux进行交互(读入客户程序)
- 有调试器的功能
如果没有monitor,对NEMU的调试将极为困难
NEMU源文件组织
1 | nemu |
为了支持不同的ISA, 框架代码把NEMU分成两部分: ISA无关的基本框架和ISA相关的具体实现。NEMU把ISA相关的代码专门放在
nemu/src/isa/目录下, 并通过nemu/include/isa.h提供ISA相关API的声明. 这样以后,nemu/src/isa/之外的其它代码就展示了NEMU的基本框架.体现抽象的思想: 框架代码将ISA之间的差异抽象成API, 基本框架会调用这些API, 从而无需关心ISA的具体细节. 如果你将来打算选择一个不同的ISA来进行二周目的攻略, 你就能明显体会到抽象的好处了: 基本框架的代码完全不用修改!
NEMU ISA相关说明文档:这里
配置系统和项目构建
配置系统kconfig
为什么要使用配置系统?
可配置选项的数量可能会非常多, 而且配置选项之间可能会存在关联。比如打开配置选项A之后, 配置选项B就必须是某个值. 直接让开发者去管理这些配置选项是很容易出错的, 比如修改选项A之后, 可能会忘记修改和选项A有关联的选项B. 配置系统的出现则是为了解决这个问题.
NEMU中的配置系统位于nemu/tools/kconfig
kconfig定义了一套简单的语言, 开发者可以使用这套语言来编写”配置描述文件”.
在”配置描述文件”中, 开发者可以描述:
- 配置选项的属性, 包括类型, 默认值等
- 不同配置选项之间的关系
- 配置选项的层次关系
当你键入make menuconfig的时候, 背后其实发生了如下事件:
检查
nemu/tools/kconfig/build/mconf程序是否存在, 若不存在, 则编译并生成mconf检查
nemu/tools/kconfig/build/conf程序是否存在, 若不存在, 则编译并生成conf运行命令
mconf nemu/Kconfig, 此时mconf将会解析nemu/Kconfig中的描述, 以菜单树的形式展示各种配置选项, 供开发者进行选择退出菜单时,
mconf会把开发者选择的结果记录到nemu/.config文件中运行命令
conf --syncconfig nemu/Kconfig, 此时conf将会解析nemu/Kconfig中的描述, 并读取选择结果nemu/.config, 结合两者来生成如下文件:- 可以被包含到C代码中的宏定义(
nemu/include/generated/autoconf.h) - 可以被包含到Makefile中的变量定义(
nemu/include/config/auto.conf) - 可以被包含到Makefile中的, 和”配置描述文件”相关的依赖规则(
nemu/include/config/auto.conf.cmd), 为了阅读代码, 我们可以不必关心它 - 通过时间戳来维护配置选项变化的目录树
nemu/include/config/, 它会配合另一个工具nemu/tools/fixdep来使用, 用于在更新配置选项后节省不必要的文件编译, 为了阅读代码, 我们可以不必关心它。
- 可以被包含到C代码中的宏定义(
所以, 目前我们只需要关心配置系统生成的如下文件:
nemu/include/generated/autoconf.h, 阅读C代码时使用nemu/include/config/auto.conf, 阅读Makefile时使用
项目构建和Makefile
与配置系统进行关联
通过包含nemu/include/config/auto.conf, 与kconfig生成的变量进行关联. 因此在通过menuconfig更新配置选项后, Makefile的行为可能也会有所变化.
文件列表
通过filelist决定最终参与编译的源文件,它们会根据menuconfig的配置对如下4个变量进行维护:
SRCS-y- 参与编译的源文件的候选集合SRCS-BLACKLIST-y- 不参与编译的源文件的黑名单集合DIRS-y- 参与编译的目录集合, 该目录下的所有文件都会被加入到SRCS-y中DIRS-BLACKLIST-y- 不参与编译的目录集合, 该目录下的所有文件都会被加入到SRCS-BLACKLIST-y中
Makefile会包含项目中的所有filelist.mk文件, 对上述4个变量的追加定义进行汇总, 最终会过滤出在SRCS-y中但不在SRCS-BLACKLIST-y中的源文件, 来作为最终参与编译的源文件的集合.
1 | # Include all filelist.mk to merge file lists |
上述4个变量还可以与menuconfig的配置结果中的布尔选项进行关联, 例如DIRS-BLACKLIST-$(CONFIG_TARGET_AM) += src/monitor/sdb, 当我们在menuconfig中选择了TARGET_AM相关的布尔选项时, kconfig最终会在nemu/include/config/auto.conf中生成形如CONFIG_TARGET_AM=y的代码, 对变量进行展开后将会得到DIRS-BLACKLIST-y += src/monitor/sdb; 当我们在menuconfig中未选择TARGET_AM相关的布尔选项时, kconfig将会生成形如CONFIG_TARGET_AM=n的代码, 或者未对CONFIG_TARGET_AM进行定义, 此时将会得到DIRS-BLACKLIST-n += src/monitor/sdb, 或者DIRS-BLACKLIST- += src/monitor/sdb, 这两种情况都不会影响DIRS-BLACKLIST-y的值, 从而实现了如下效果:
1 | 在menuconfig中选中TARGET_AM时, nemu/src/monitor/sdb目录下的所有文件都不会参与编译. |
编译和链接
Makefile的编译规则在nemu/scripts/build.mk中定义:
1 | # Compilation patterns |
Makefile 中的
^, ? 符號
1 | $@ 表示目標文件 |
- call_fixdep 调用用于生成更合理的依赖关系
链接命令:
1 | $(BINARY): $(OBJS) $(ARCHIVES) |
准备第一个客户程序
NEMU is a process that execute guest process
We need to read guest process into our computer, monitor is responsible for this part.
When NEMU is starting, it will first call init_monitor() to do some initialization work.(在nemu/src/monitor/monitor.c中定义)
kconfig generates 宏
kconfig will define some CONFIG_xxx in ‘nemu/include/generated/autoconf.h’ according to the configuration we made in kconfig.
we can also test these defines using conditional compiling. For example, if CONFIG_DEVICE is not defined, device related code will not be compiled.
To write more compact code, we define a lot of test in nemu/inlcude/generated/autoconf.h:IFDEF(CONFIG_DEVICE, init_device()); 而MUXDEF(CONFIG_TRACE, "ON", "OFF")则表示, 如果定义了CONFIG_TRACE, 则预处理结果为"ON"("OFF"在预处理后会消失), 否则预处理结果为"OFF".
1 | void init_monitor(int argc, char *argv[]) { |
- We can see that in the i
nit_monitor(), all lines are functions. And inparse_args():
1 | static int parse_args(int argc, char *argv[]) { |
some notes about getopt_long()
getopt_long() works like getopt() except that it also accept long options :”–”.
longopts is a pointer to the first element of an array of struct option:
1 | struct option{ |
The last element of the array has to be filled with zeros
接下来monitor会调用init_isa()函数(在nemu/src/isa/$ISA/init.c中定义), 来进行一些ISA相关的初始化工作.
init_isa()函数的第一项工作:读入客户程序到内存里
- 客户程序是什么?:程序本身是ISA相关的,因此内置程序放在
nemu/src/isa/$ISA/init.c中。 - 内存是什么?:一段连续的地址空间,按字节编址(一个内存位置存放一个字节的数据)。 在C语言中我们就很自然地使用一个
uint8_t类型的数组来对内存进行模拟。NEMU默认为客户计算机提供128MB的物理内存(见nemu/src/memory/paddr.c中定义的pmem) - 需要将客户程序读入到内存的什么位置?
约定. 具体地, 我们让monitor直接把客户程序读入到一个固定的内存位置RESET_VECTOR。其值在nemu/include/memory/paddr.h中定义.
BIOS和计算机启动
在真实的计算机系统中, 计算机启动后首先会把控制权交给BIOS, BIOS经过一系列初始化工作之后, 再从磁盘中将有意义的程序读入内存中执行.对这个过程的模拟需要了解很多超出本课程范围的细节, 我们在PA中做了简化: 采取约定的方式让CPU直接从约定的内存位置开始执行.
初探操作系统启动
如何得知操作系统在启动时,做了什么?
- 在linux中,
sudo dmesg可以输出操作系统的启动日志
init_isa()函数的第二项工作:是初始化寄存器
在C语言中我们就很自然地使用相应的结构体来描述CPU的寄存器结构.
不同ISA的寄存器结构也各不相同, 为此我们把寄存器结构体CPU_state的定义放在nemu/src/isa/$ISA/include/isa-def.h中, 并在nemu/src/cpu/cpu-exec.c中定义一个全局变量cpu.
初始化寄存器的一个重要工作就是设置cpu.pc的初值, 我们需要将它设置成刚才加载客户程序的内存位置, 这样就可以让CPU从我们约定的内存位置开始执行客户程序了
物理内存的起始地址
x86的物理内存是从0开始编址的
例如mips32和riscv32的物理地址均从0x80000000开始。因此对于上面的两个,其CONFIG_MBASE,将会被定义为:0x80000000,将来CPU访问内存时,我们会将要访问的内存地址映射到**pmem中的相应偏移位置**,这是通过nemu/src/memory/paddr.c中的guest_to_host()函数实现的.
Monitor读入客户程序并对寄存器进行初始化后, 这时内存的布局如下:
1 | pmem: |
运行第一个客户程序
main()函数包含了monitor的初始化,并且会继续调用engine_start函数。代码会进入简易调试器的主循环。
键入c后,执行主循环cpu_exec, 它又会调用execute()。后者模拟了CPU的工作方式。它又会执行exec_once():让CPU执行当前PC指向的一条指令,然后更新PC。
不同的ISA有着不同的指令格式和含义, 因此执行指令的代码自然是ISA相关的. 这部分代码位于nemu/src/isa/$ISA/inst.c. 关于指令执行的详细说明需要涉及很多细节, 目前你无需关心, 我们将会在PA2中进行说明.
何时退出指令的循环?
达到要求的循环次数.
客户程序执行了nemu_trap指令. 这是一条虚构的特殊指令, 它是为了在NEMU中让客户程序指示执行的结束而加入的, NEMU在ISA手册中选择了一些用于调试的指令, 并将nemu_trap的特殊含义赋予它们.
例如在riscv32的手册中, NEMU选择了ebreak指令来充当nemu_trap. 为了表示客户程序是否成功结束, nemu_trap指令还会接收一个表示结束状态的参数. 当客户程序执行了这条指令之后, NEMU将会根据这个结束状态参数来设置NEMU的结束状态, 并根据不同的状态输出不同的结束信息, 主要包括
HIT GOOD TRAP- 客户程序正确地结束执行HIT BAD TRAP- 客户程序错误地结束执行ABORT- 客户程序意外终止, 并未结束执行
怎么读代码?
有没有工具能够帮你模拟这个巨大的状态机呢? 这时我们在PA0里面提到的一个工具就派上用场了, 它就是GDB. 在GDB中, 我们可以通过单步执行的方式让程序一次执行一条指令, 相当于让状态机一次只前进一步, 这样我们就可以观察程序任意时刻的状态了! 而且状态机前进的轨迹就是程序执行的真实顺序, 于是你就可以一边运行程序一边理解程序的行为了. 这对于一些指针相关的代码有着不错的效果, 尤其是函数指针, 因为你从静态代码上很可能看不出来程序运行的时候这个指针会指向哪个函数.
GDB还自带一个叫TUI的简单界面. 在一个高度较高的窗口中运行GDB后, 输入layout split就可以切换到TUI, 这样你就可以同时从源代码和指令的角度来观察程序的行为了. 不过为了看到源代码, 你还需要在编译NEMU时添加GDB调试信息, 具体操作见下面的提示框. 如果你想了解TUI的更多内容, STFW.
为了帮助你更高效地RTFSC, 你最好通过RTFM和STFW多认识GDB的一些命令和操作, 比如:
- 单步执行进入你感兴趣的函数
- 单步执行跳过你不感兴趣的函数(例如库函数)
- 运行到函数末尾
- 打印变量或寄存器的值
- 扫描内存
- 查看调用栈
- 设置断点
- 设置监视点
为NEMU编译时添加GDB调试信息
menuconfig已经为大家准备好相应选项了, 你只需要打开它:
1 | Build Options |
然后清除编译结果并重新编译即可. 尝试阅读相关代码, 理解开启上述menuconfig选项后会导致编译NEMU时的选项产生什么变化.
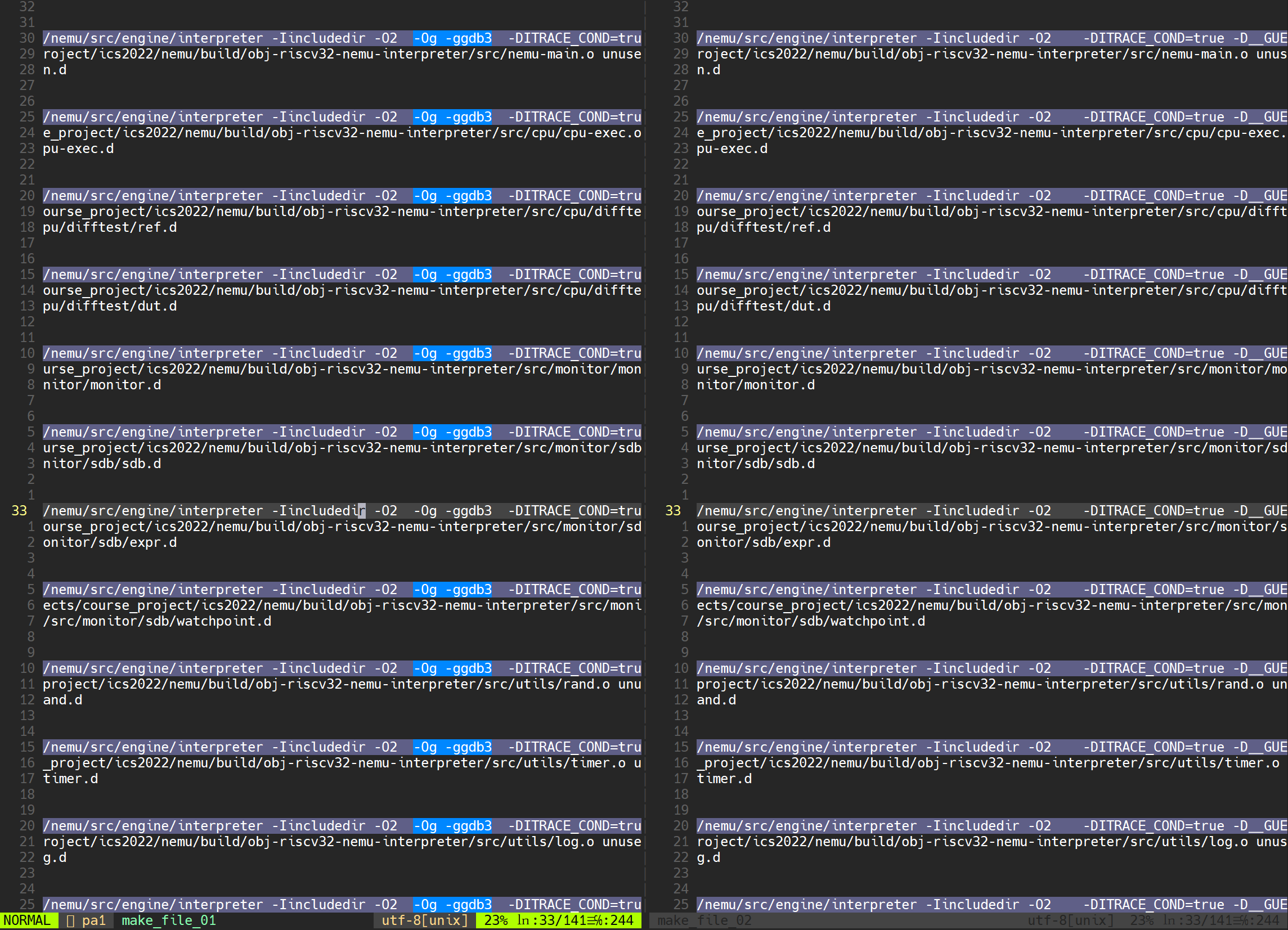
- ggdb3指的是debug的level为3级,会输出一些额外的信息
- Og指的是优化debug体验,会减少一些优化级别,以加快编译
基础设施: 简易调试器
- Post title:PA1项目心得记录
- Post author:sixwalter
- Create time:2023-08-05 11:14:26
- Post link:https://coelien.github.io/2023/08/05/projects/general notes/pa1/
- Copyright Notice:All articles in this blog are licensed under BY-NC-SA unless stating additionally.