
自动驾驶仿真测试系统调研
调研方法
我们采取了阅读自动驾驶相关论文、github开源项目搜索、官网搜索等方式,对目前市面上用于研究或商业目的的自动驾驶仿真系统进行了调研。以下是我们的调研结果:
自动驾驶主要结构
我们首先调研了自动驾驶仿真工具的整体功能模块结构,如下图所示:
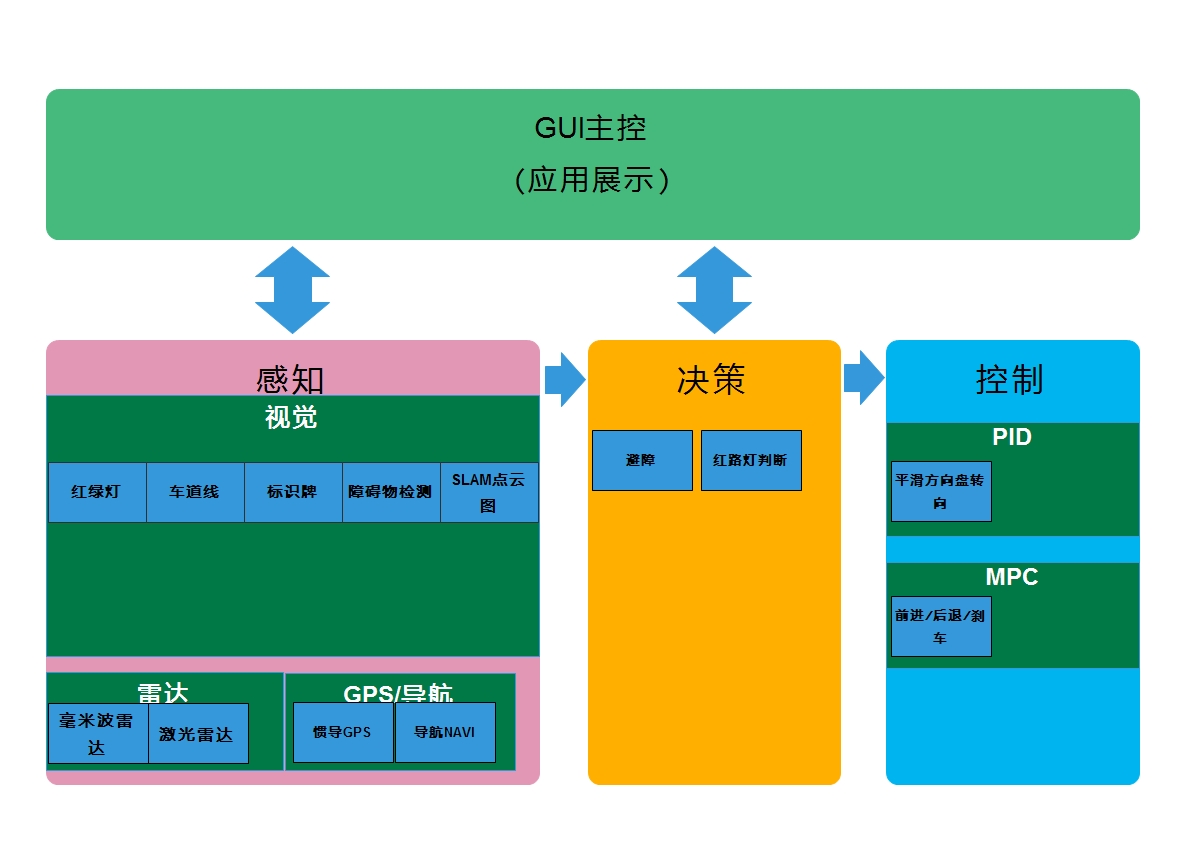
如图,自动驾驶仿真系统的主要结构包括:GUI主控,感知,决策和控制四个部分。GUI主控是展示自动驾驶算法的用户界面和仿真场景,在上面我们可以直观地检验我们所设计的算法的效果。感知是视觉算法的主阵地,通过车道线检测、标识牌检测、障碍物检测、车辆目标检测算法,我们可以估计目标与自动驾驶车辆的距离并进行决策。雷达和GPS也是进行决策的辅助信息。在决策模块,我们将通过感知得到的相关距离等数据进行利用以对未来的路径规划进行决策。控制模块根据得到的决策对车辆进行控制,以改变车辆行为。
目前市面上用于工程商业目的的自动驾驶仿真系统包括:用于车辆动力学的 CarSim、用于复杂车辆模型和交通场景的 PanoSim、用于高级驾驶辅助系统(ADAS)的 PreScan。例如PanoSim支持自动驾驶感知/决策/规划/控制算法开发。它构建的交通场景具有一定的真实性与复杂性,适合我们在之上进行算法的开发。
我们对项目从两个角度进行了调研:github上的开源代码和仿真平台商业软件
github开源代码
unity
效果未知,因为星数极少
c++
效果未知,因为星数极少
- 自动驾驶模拟仿真实现:链接,程序主要模块如上图所示
python
项目可以正常演示,较合适,但需要申请仿真服务器API接口的使用权限,下面有介绍
- 将算法与仿真平台相结合的开源项目:链接,运行示意图如下:

仿真平台(不开源,需要申请使用)
- AD Chauffeur:官网
- 申请得到用户名和密码:
- panosim:官网
调研结果
推荐使用第三种方案,即python + 仿真平台API
- Post title:
- Post author:sixwalter
- Create time:2023-08-05 11:14:26
- Post link:https://coelien.github.io/2023/08/05/projects/huawei project/自动驾驶仿真测试调研/
- Copyright Notice:All articles in this blog are licensed under BY-NC-SA unless stating additionally.
Comments